


© franz pfluegl dreamstime.com
Przemysł elektroniczny |
Egzoszkielet z Politechniki Warszawskiej
W Polsce aż 1,3 mln osób to niepełnosprawni w stopniu znacznym, co piętnasty z nich nie jest w stanie przejść samodzielnie 500 metrów, ani poruszać się po schodach. Naukowcy z PW chcą to zmienić.
Celem projektu prowadzonego przez naukowców z Zakładu Konstrukcji Urządzeń Precyzyjnych Instytutu Mikromechaniki i Fotoniki Wydziału Mechatroniki Politechniki Warszawskiej, pod kierownictwem prof. Danuta Jasińskiej-Choromańskiej jest opracowanie i zbudowanie ezgoszkieletu, który pomoże niepełnosprawnym znowu się poruszać.
Egzoszkielety znalazły już swoje zastosowanie w wojsku. Mają one wspomagać pracę żołnierza, który musi niekiedy przejść wiele kilometrów ze znacznym obciążeniem. W takim przypadku aparatura odbiera jednak sygnały z mięśni – wspomaga chód, ale nie zastępuje go.
Urządzenie, które budują naukowcy z Wydziału Mechatroniki PW to właściwie robot ortotyczny, czyli układ wspomagania ruchu osób niepełnosprawnych, które nie mają czynnych mięśni odpowiadających za chodzenie, ponieważ ich nie używają. Robot ortotyczny to szansa na chodzenie dla osób, które dotąd poruszały się na wózku inwalidzkim.
System umożliwia nie tylko wykonywanie pięciu podstawowych czynności, takich jak wstawanie i siadanie, wchodzenie po schodach i schodzenie z nich oraz chodzenie po płaszczyźnie. To rozwiązanie przede wszystkim daje szansę osobom niepełnosprawnym na normalne funkcjonowanie w społeczeństwie.
– Niepełnosprawny będzie musiał mimo wszystko poruszać się przy pomocy kul lub balkonika, ponieważ potrzebuje trzech punktów podparcia, by utrzymać równowagę – mówi prof. Danuta Jasińska-Chromańska z Wydziału Mechatroniki Politechniki Warszawskiej.
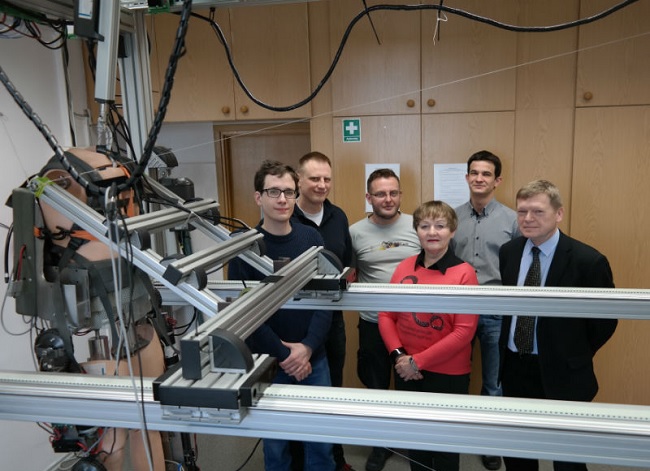 Na zdjęciu zespół pracujący nad egzoszkieletem, od lewej: mgr inż. Wojciech Credo, dr inż. Marcin Zaczyk, mgr inż. Błażej Kabziński, prof. nzw. dr hab. inż. Danuta Jasińska-Choromańska, mgr inż. Karol Bagiński, dr inż. Jakub Wierciak, fot. BPI
Inteligentny system
Każda z funkcji robota ortotycznego jest zaprogramowana w ręcznym panelu. Aby monitorować ruchy użytkownika, system zbiera informacje z czujników – umieszczonych w kulach, pod stopami, na czubku „buta” i na pięcie. Wszystkie informacje zbierane przez urządzenie przetwarzane są na sygnał elektryczny. – Dostajemy informacje z czujników, np. ile w danym monecie osoba ma punktów podparcia – tłumaczy prof. Danuta Jasińska-Choromańska. – Przy wejściu na schody urządzenie musi otrzymać informację, kiedy stopień się zaczyna, a kiedy kończy. Analogiczna sytuacja ma miejsce podczas schodzenia.
Do tych informacji dochodzą dane dotyczące kątowych przemieszczeń w stawie skokowym, kolanowym i biodrowym. Układ sterowania przetwarza te sygnały na informacje. Dla każdej z pięciu funkcji opracowano algorytmy, które mają odzwierciedlenie w konkretnych trybach w panelu sterowania: chodzenie, wchodzenie i schodzenie po schodach oraz siadanie na krześle i wstawanie z niego. Energia do wykonania wszystkich czynności pochodzi z akumulatora, który obecnie znajduje się w skrzynce na plecach.
Zrozumieć jak funkcjonuje osoba niepełnosprawna
Lekarz i rehabilitanci określili przy jakich schorzeniach używanie egzoszkieletu będzie możliwe, a przy jakich jest wykluczone. Budowa takiego systemu nie obyła się także bez konsultacji z osobami, które potencjalnie będą z niego korzystać. Dla naukowców z Politechniki Warszawskiej problemy i sugestie osób niepełnosprawnych były niekiedy zaskakujące. – Okazało się, że oni wcale nie chcą, żeby ten system był chowany pod ubraniem, nawet wolą, żeby był umieszczany na zewnątrz – opowiada prof. Danuta Jasińska-Choromańska. – Nie chcą tylko, żeby system ten był świecący, brzęczący, rzucający się celowo w oczy. Osoby niepełnosprawne boją się tego typu nowości, dlatego że nie mają poczucia równowagi, które posiadają osoby sprawne.
Zupełnie inne podejście do tego typu nowinek technologicznych mają osoby, które sprawność ruchową straciły, np. w wyniku wypadku. Taka osoba pamięta siebie jako sprawną, chce jak najszybciej do takiego stanu wrócić i chętnie korzysta z tego typu udogodnień.
Coraz bliżej celu
Zespół chce rozwijać projekt: pracuje nad kolejnymi funkcjami robota, np. nad ruchomością stopy, żeby ułatwić skręcanie. Naukowcy chcą ubiegać się o zgodę Komisji Etyki Lekarskiej o możliwość testowania urządzenia na ludziach. Dopiero po takich badaniach można będzie ten system wdrażać.
Początkowym założeniem było to, aby system nie kosztował więcej niż 35 tys. zł., co dla osoby niepełnosprawnej i tak jest ogromną kwotą. – Wiemy już, że ze względu na kwestie techniczne nie zamkniemy się w kwocie mniejszej niż 60 tys. zł. – mówi prof. Danuta Jasińska-Choromańska.
Egzoszkielet powstawał jako część projektu „Eco-Mobilność” realizowanego w ramach Programu Operacyjnego Innowacyjna Gospodarka - Priorytet I. Kierownikiem całego projektu był prof. Włodzimierz Choromański z Wydziału Transportu. W skonstruowanie egzoszkieletu zaangażowane były nie tylko osoby z Wydziału Mechatroniki PW, lecz także m.in.: absolwent PW, dr inż. Mariusz Bojarski z New York University, który odpowiadał za elektronikę, lekarze ortopedzi, rehabilitanci, osoby niepełnosprawne, a testy wśród osób niepełnosprawnych przeprowadziły osoby z Wydziału Administracji i Nauk Społecznych PW.
Prace nad egzoszkieletem rozpoczęły się w październiku 2009 roku. Naukowcy zbudowali prototyp, nietestowany dotąd na ludziach, chcą jednak kontynuować prace i w przyszłości umożliwić korzystanie z tego urządzenia niepełnosprawnym.
Źródło: [copy]Politechnika Warszawska[copy]
Na zdjęciu zespół pracujący nad egzoszkieletem, od lewej: mgr inż. Wojciech Credo, dr inż. Marcin Zaczyk, mgr inż. Błażej Kabziński, prof. nzw. dr hab. inż. Danuta Jasińska-Choromańska, mgr inż. Karol Bagiński, dr inż. Jakub Wierciak, fot. BPI
Inteligentny system
Każda z funkcji robota ortotycznego jest zaprogramowana w ręcznym panelu. Aby monitorować ruchy użytkownika, system zbiera informacje z czujników – umieszczonych w kulach, pod stopami, na czubku „buta” i na pięcie. Wszystkie informacje zbierane przez urządzenie przetwarzane są na sygnał elektryczny. – Dostajemy informacje z czujników, np. ile w danym monecie osoba ma punktów podparcia – tłumaczy prof. Danuta Jasińska-Choromańska. – Przy wejściu na schody urządzenie musi otrzymać informację, kiedy stopień się zaczyna, a kiedy kończy. Analogiczna sytuacja ma miejsce podczas schodzenia.
Do tych informacji dochodzą dane dotyczące kątowych przemieszczeń w stawie skokowym, kolanowym i biodrowym. Układ sterowania przetwarza te sygnały na informacje. Dla każdej z pięciu funkcji opracowano algorytmy, które mają odzwierciedlenie w konkretnych trybach w panelu sterowania: chodzenie, wchodzenie i schodzenie po schodach oraz siadanie na krześle i wstawanie z niego. Energia do wykonania wszystkich czynności pochodzi z akumulatora, który obecnie znajduje się w skrzynce na plecach.
Zrozumieć jak funkcjonuje osoba niepełnosprawna
Lekarz i rehabilitanci określili przy jakich schorzeniach używanie egzoszkieletu będzie możliwe, a przy jakich jest wykluczone. Budowa takiego systemu nie obyła się także bez konsultacji z osobami, które potencjalnie będą z niego korzystać. Dla naukowców z Politechniki Warszawskiej problemy i sugestie osób niepełnosprawnych były niekiedy zaskakujące. – Okazało się, że oni wcale nie chcą, żeby ten system był chowany pod ubraniem, nawet wolą, żeby był umieszczany na zewnątrz – opowiada prof. Danuta Jasińska-Choromańska. – Nie chcą tylko, żeby system ten był świecący, brzęczący, rzucający się celowo w oczy. Osoby niepełnosprawne boją się tego typu nowości, dlatego że nie mają poczucia równowagi, które posiadają osoby sprawne.
Zupełnie inne podejście do tego typu nowinek technologicznych mają osoby, które sprawność ruchową straciły, np. w wyniku wypadku. Taka osoba pamięta siebie jako sprawną, chce jak najszybciej do takiego stanu wrócić i chętnie korzysta z tego typu udogodnień.
Coraz bliżej celu
Zespół chce rozwijać projekt: pracuje nad kolejnymi funkcjami robota, np. nad ruchomością stopy, żeby ułatwić skręcanie. Naukowcy chcą ubiegać się o zgodę Komisji Etyki Lekarskiej o możliwość testowania urządzenia na ludziach. Dopiero po takich badaniach można będzie ten system wdrażać.
Początkowym założeniem było to, aby system nie kosztował więcej niż 35 tys. zł., co dla osoby niepełnosprawnej i tak jest ogromną kwotą. – Wiemy już, że ze względu na kwestie techniczne nie zamkniemy się w kwocie mniejszej niż 60 tys. zł. – mówi prof. Danuta Jasińska-Choromańska.
Egzoszkielet powstawał jako część projektu „Eco-Mobilność” realizowanego w ramach Programu Operacyjnego Innowacyjna Gospodarka - Priorytet I. Kierownikiem całego projektu był prof. Włodzimierz Choromański z Wydziału Transportu. W skonstruowanie egzoszkieletu zaangażowane były nie tylko osoby z Wydziału Mechatroniki PW, lecz także m.in.: absolwent PW, dr inż. Mariusz Bojarski z New York University, który odpowiadał za elektronikę, lekarze ortopedzi, rehabilitanci, osoby niepełnosprawne, a testy wśród osób niepełnosprawnych przeprowadziły osoby z Wydziału Administracji i Nauk Społecznych PW.
Prace nad egzoszkieletem rozpoczęły się w październiku 2009 roku. Naukowcy zbudowali prototyp, nietestowany dotąd na ludziach, chcą jednak kontynuować prace i w przyszłości umożliwić korzystanie z tego urządzenia niepełnosprawnym.
Źródło: [copy]Politechnika Warszawska[copy]
Na zdjęciu zespół pracujący nad egzoszkieletem, od lewej: mgr inż. Wojciech Credo, dr inż. Marcin Zaczyk, mgr inż. Błażej Kabziński, prof. nzw. dr hab. inż. Danuta Jasińska-Choromańska, mgr inż. Karol Bagiński, dr inż. Jakub Wierciak, fot. BPI
Inteligentny system
Każda z funkcji robota ortotycznego jest zaprogramowana w ręcznym panelu. Aby monitorować ruchy użytkownika, system zbiera informacje z czujników – umieszczonych w kulach, pod stopami, na czubku „buta” i na pięcie. Wszystkie informacje zbierane przez urządzenie przetwarzane są na sygnał elektryczny. – Dostajemy informacje z czujników, np. ile w danym monecie osoba ma punktów podparcia – tłumaczy prof. Danuta Jasińska-Choromańska. – Przy wejściu na schody urządzenie musi otrzymać informację, kiedy stopień się zaczyna, a kiedy kończy. Analogiczna sytuacja ma miejsce podczas schodzenia.
Do tych informacji dochodzą dane dotyczące kątowych przemieszczeń w stawie skokowym, kolanowym i biodrowym. Układ sterowania przetwarza te sygnały na informacje. Dla każdej z pięciu funkcji opracowano algorytmy, które mają odzwierciedlenie w konkretnych trybach w panelu sterowania: chodzenie, wchodzenie i schodzenie po schodach oraz siadanie na krześle i wstawanie z niego. Energia do wykonania wszystkich czynności pochodzi z akumulatora, który obecnie znajduje się w skrzynce na plecach.
Zrozumieć jak funkcjonuje osoba niepełnosprawna
Lekarz i rehabilitanci określili przy jakich schorzeniach używanie egzoszkieletu będzie możliwe, a przy jakich jest wykluczone. Budowa takiego systemu nie obyła się także bez konsultacji z osobami, które potencjalnie będą z niego korzystać. Dla naukowców z Politechniki Warszawskiej problemy i sugestie osób niepełnosprawnych były niekiedy zaskakujące. – Okazało się, że oni wcale nie chcą, żeby ten system był chowany pod ubraniem, nawet wolą, żeby był umieszczany na zewnątrz – opowiada prof. Danuta Jasińska-Choromańska. – Nie chcą tylko, żeby system ten był świecący, brzęczący, rzucający się celowo w oczy. Osoby niepełnosprawne boją się tego typu nowości, dlatego że nie mają poczucia równowagi, które posiadają osoby sprawne.
Zupełnie inne podejście do tego typu nowinek technologicznych mają osoby, które sprawność ruchową straciły, np. w wyniku wypadku. Taka osoba pamięta siebie jako sprawną, chce jak najszybciej do takiego stanu wrócić i chętnie korzysta z tego typu udogodnień.
Coraz bliżej celu
Zespół chce rozwijać projekt: pracuje nad kolejnymi funkcjami robota, np. nad ruchomością stopy, żeby ułatwić skręcanie. Naukowcy chcą ubiegać się o zgodę Komisji Etyki Lekarskiej o możliwość testowania urządzenia na ludziach. Dopiero po takich badaniach można będzie ten system wdrażać.
Początkowym założeniem było to, aby system nie kosztował więcej niż 35 tys. zł., co dla osoby niepełnosprawnej i tak jest ogromną kwotą. – Wiemy już, że ze względu na kwestie techniczne nie zamkniemy się w kwocie mniejszej niż 60 tys. zł. – mówi prof. Danuta Jasińska-Choromańska.
Egzoszkielet powstawał jako część projektu „Eco-Mobilność” realizowanego w ramach Programu Operacyjnego Innowacyjna Gospodarka - Priorytet I. Kierownikiem całego projektu był prof. Włodzimierz Choromański z Wydziału Transportu. W skonstruowanie egzoszkieletu zaangażowane były nie tylko osoby z Wydziału Mechatroniki PW, lecz także m.in.: absolwent PW, dr inż. Mariusz Bojarski z New York University, który odpowiadał za elektronikę, lekarze ortopedzi, rehabilitanci, osoby niepełnosprawne, a testy wśród osób niepełnosprawnych przeprowadziły osoby z Wydziału Administracji i Nauk Społecznych PW.
Prace nad egzoszkieletem rozpoczęły się w październiku 2009 roku. Naukowcy zbudowali prototyp, nietestowany dotąd na ludziach, chcą jednak kontynuować prace i w przyszłości umożliwić korzystanie z tego urządzenia niepełnosprawnym.
Źródło: [copy]Politechnika Warszawska[copy]