


© Evertiq
Komponenty |
Systemy zasilania na 2 MHz – wady i zalety
Wraz z projektantami z TI, na przykładzie ich nowego, wysoce zintegrowanego konwertera, przedstawimy wady i zalety takich systemów; na co warto zwracać uwagę, przy wyborze tej częstotliwości przełączania.
Projektanci aplikacji motoryzacyjnych muszą spełnić wiele wymagań dotyczących kompatybilności elektromagnetycznej (EMC). Jednym z wyzwań, jakiemu muszą sprostać jest dobór odpowiedniej częstotliwości przełączania w układach zasilających (fsw), aby móc sprostać tym wymaganiom. Z racji wymagań, stawianym pasmom 400 kHz i 2 MHz, projektanci najczęściej wybierają właśnie te częstotliwości.
Popularną częstotliwością jest 2 MHz. W niniejszym artykule postaramy się Państwu przybliżyć dlaczego. Układem, który posłuży za przykład będzie nowy synchroniczny konwerter DC/DC od Texas Instruments, oznaczony jako TPS54116-Q1. Na podstawie informacji zawartych przez producenta, można wyznaczyć kilka punktów, istotnych dla projektanta, przy tworzeniu systemów zasilających, dla wrażliwych aplikacji. Najpierw jednak o samym układzie.
Przeznaczony jest do pracy w aplikacjach motoryzacyjnych i przemysłowych. Wysoki stopień zintegrowania pozwala uprościć budowane aplikacji oraz zmniejszyć ich gabaryty (np. poprzez zmniejszenie cewek). Zastosowaniem mają być głównie systemy zasilające pamięci DDR2, DDR3 i DDR3L.
Akceptowalne napięcie wejściowe mieści się w zakresie od niecałych 3 V do 6 V. Jego wydajność liczona jest na 4 A i posiadać ma dodatkowe wyprowadzenia i funkcje, pozwalające na redukcję wymiarów gotowego układu zasilającego o 50%, w porównaniu do klasycznych rozwiązań.
Pracować ma w trybie prądowym, oraz z częstotliwością przełączania do 2.5 MHz. Jest to wartość nieprzypadkowa. Ale o tym więcej za chwilę. Posiada zintegrowany wydajny tranzystor MOSFET. Dostępny ma być w obudowie WQFN o wymiarach 4 na 4 mm, w cenie od 2.50 USD przy zamówieniach hurtowych.
Wracając do tematu systemów zasilających, pracujących z częstotliwością przełączania 2 MHz; ważnym parametrem dla układów takich jest minimalny czas załączenia. W konwerterach obniżających napięcie, tranzystor MOSFET musi zdążyć się włączyć o odpowiednio długo utrzymać ten stan. W trybie sterowania prądowego, czas ten jest zwykle ograniczony poprzez wygaszania się sygnału pochodzącego od czujnika prądowego.
Czas ten może ulec zmianie, odpowiednio wzrastając. Może być kilka powodów powstawania tego stanu rzeczy, jak np.: 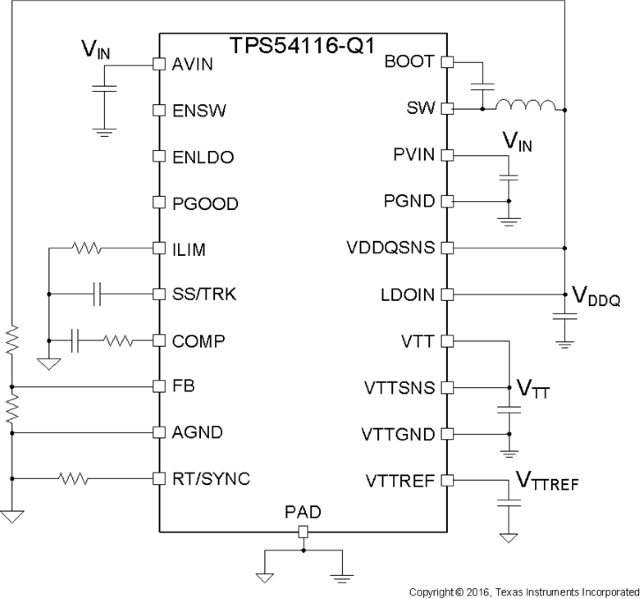 © Texas Instrumens
© Texas Instrumens
- Przy spadku napięcia wywołanym bardzo dużym obciążeniem,
- W przypadku złego dobrania tranzystorów z ich czasem załączania i wyłączania, gdy w grę wchodzą czasy martwe. Pojawia się też wpływ pojemności pasożytniczych, pochodzących od cewki. Przy małych obciążeniach, cykl ładowania i rozładowywania pojemności jest wolniejszy, co może powodować wydłużenie czasu załączania i wyłączania się tranzystora.
- W przypadku zakłóceń napięciowych w okresie trwania tzw czasu martwego. Kiedy tranzystor „low-side” wyłączy się, a „high-side” włączy, prąd przepływający przez cewkę powodować może wzrost napięcia w torze zasilającym, do czasu zadziałania diody zwrotna drugiego z tranzystorów.
© Texas Instrumens
