© Siemens
Przemysł elektroniczny |
Magiczna rękawica – robotyczny projekt przyszłości Siemensa
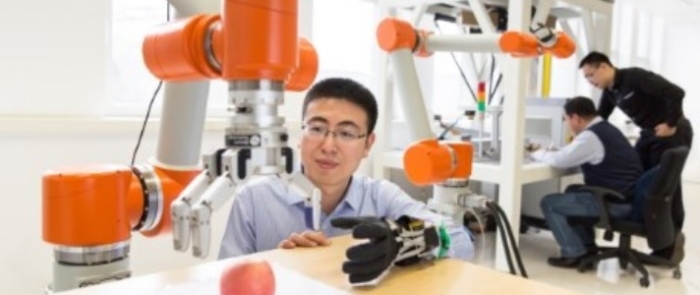
W Chinach zespół badaczy firmy Siemens analizuje podstawowe funkcje, które w przyszłości pozwolą na interakcje ludzi i robotów w branżach przemysłowych. Kluczową częścią tego projektu jest opracowanie tzw. rękawicy danych.
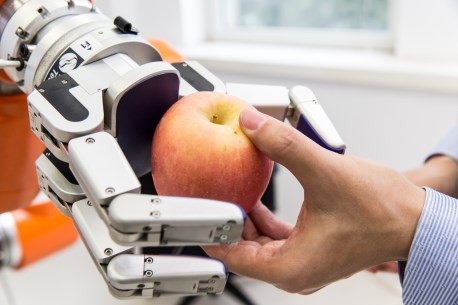
Rękawica danych Siemensa może być wykorzystana do przechwytywania i kopiowania ruchów, gestów oraz siły nacisku rąk ludzkich. Pozwoli to na opisanie skomplikowanych poleceń i nauczenie robotów, jak powinny bezpiecznie obchodzić się z różnego rodzaju przedmiotami.
Kiedy w 1952 r. pojawiły się roboty przemysłowe, na początku były opisywane jako duże, ciężkie, statyczne, niebezpieczne dla ludzi i zdolne do wykonywania tylko powtarzających się, wstępnie zaprogramowanych zadań. Chociaż wiele z tego opisu do dziś jest prawdą, to postępy w dziedzinie mikroelektroniki, czujników, sieci i algorytmów otwierają kolejny etap dla nowej ery półautomatycznych robotów.
Główne zmiany potwierdzają również zbieżność dwóch pozornie sprzecznych trendów: rosnącej złożoności produktów i rosnącego popytu na zindywidualizowane rozwiązania. Aby je zrealizować skoncentrowano się na koncepcji elastycznego wytwarzania, charakteryzującego się lekkimi robotami przemysłowymi, które można łatwo i tanio wykorzystać ponownie do innych działań, a co najważniejsze – będą one zdolne do bezpiecznego współdziałania z ludźmi. Wraz z rozwojem tych nowych funkcji, otworzyły się drzwi do krótkotrwałej produkcji małych partii przedmiotów – co zostało przewidziane w niemieckiej koncepcji "Przemysłu 4.0" – oraz podjęto pierwsze kroki w kierunku stworzenia autonomicznych asystentów-robotów.
Magiczna rękawica
 W Chinach, w ramach projektu "Autonomous Systems Revolution" stworzonego przez dział Corporate Technology (CT) Siemensa, zespół badaczy analizuje podstawowe funkcje, które w przyszłości pozwolą na interakcje ludzi i robotów w branżach przemysłowych. Specjaliści opracowują tzw. rękawicę danych, która może być wykorzystana do przechwytywania ruchów oraz gestów ludzkich dłoni i opisywania ich na potrzeby powielenia przez robota.
Rękawica danych jest obecnie w wersji 2.0. Wyposażona jest w czujniki giętkie i inercyjne oraz czujniki bazujące na modelu biomechanicznym. Dzięki temu może wyczuwać ruch poszczególnych palców i ramienia użytkownika, a następnie przesyłać powiązane dane dotyczące położenia i postawy do ręki robota, który optymalizuje ruch. Czujniki bezwładnościowe mogą być również montowane na nogach, klatce piersiowej i innych częściach ciała ludzkiego w celu przechwytywania ruchów użytkownika, co ułatwia konfigurację modelu biomechanicznego.
Dzięki mikrokontrolerom na palcach rękawicy może ona generować drgania z różnymi częstotliwościami i amplitudami, które odpowiadają konkretnym uchwytom danego rodzaju przedmiotów. Funkcja sprzężenia zwrotnego pozwala na reakcję robota w czasie rzeczywistym.
Rękawice danych mogą być również stosowane do rejestrowania ruchów pracowników, którzy mają szkolić nowozatrudnionych oraz do wykrywania i naprawiania błędnych operacji. Gdy technologia ta rozwinie się, pracownicy cyfrowych fabryk będą mogli korzystać z rękawic, używając ich także w rozszerzonej rzeczywistości.
Bezpieczeństwo przede wszystkim
Jeśli roboty będą współpracować z ludźmi, kluczowe znaczenie będzie miało bezpieczeństwo. Mając to na uwadze, naukowcy z działu Corporate Technology Siemensa w Chinach opracowują nowy mechanizm kontroli, który jednocześnie zarządza pozycją i siłą ramienia robota. Biorąc pod uwagę wyraźnie określone maksymalne ograniczenie siły człowieka, robot będzie przewidywać zoptymalizowane ruchy, co uczyni z niego bezpiecznego i autonomicznego asystenta przy zachowaniu wysokiego poziomu dokładności.
Jednym z najbardziej przydatnych zastosowań nowego sposobu nauczania robotów jest ich programowanie. Tradycyjne programowanie robota jest specjalistycznym, czasochłonnym i kosztownym procesem. Wymaga profesjonalnego szkolenia i mnóstwa praktyk w terenie. Nowy sposób nauki zakłada programowanie poprzez demonstrację. W procesie chwytania i opuszczania, ramię robota jest manewrowanie poprzez sensory, dzięki którym uczy się określonych pozycji i gestów. To łatwe i elastyczne rozwiązanie, które pozwala na szybkie i sprawne dostosowanie pracy robota do wymagań danego zadania lub zlecenia.
Źródło: © Siemens
W Chinach, w ramach projektu "Autonomous Systems Revolution" stworzonego przez dział Corporate Technology (CT) Siemensa, zespół badaczy analizuje podstawowe funkcje, które w przyszłości pozwolą na interakcje ludzi i robotów w branżach przemysłowych. Specjaliści opracowują tzw. rękawicę danych, która może być wykorzystana do przechwytywania ruchów oraz gestów ludzkich dłoni i opisywania ich na potrzeby powielenia przez robota.
Rękawica danych jest obecnie w wersji 2.0. Wyposażona jest w czujniki giętkie i inercyjne oraz czujniki bazujące na modelu biomechanicznym. Dzięki temu może wyczuwać ruch poszczególnych palców i ramienia użytkownika, a następnie przesyłać powiązane dane dotyczące położenia i postawy do ręki robota, który optymalizuje ruch. Czujniki bezwładnościowe mogą być również montowane na nogach, klatce piersiowej i innych częściach ciała ludzkiego w celu przechwytywania ruchów użytkownika, co ułatwia konfigurację modelu biomechanicznego.
Dzięki mikrokontrolerom na palcach rękawicy może ona generować drgania z różnymi częstotliwościami i amplitudami, które odpowiadają konkretnym uchwytom danego rodzaju przedmiotów. Funkcja sprzężenia zwrotnego pozwala na reakcję robota w czasie rzeczywistym.
Rękawice danych mogą być również stosowane do rejestrowania ruchów pracowników, którzy mają szkolić nowozatrudnionych oraz do wykrywania i naprawiania błędnych operacji. Gdy technologia ta rozwinie się, pracownicy cyfrowych fabryk będą mogli korzystać z rękawic, używając ich także w rozszerzonej rzeczywistości.
Bezpieczeństwo przede wszystkim
Jeśli roboty będą współpracować z ludźmi, kluczowe znaczenie będzie miało bezpieczeństwo. Mając to na uwadze, naukowcy z działu Corporate Technology Siemensa w Chinach opracowują nowy mechanizm kontroli, który jednocześnie zarządza pozycją i siłą ramienia robota. Biorąc pod uwagę wyraźnie określone maksymalne ograniczenie siły człowieka, robot będzie przewidywać zoptymalizowane ruchy, co uczyni z niego bezpiecznego i autonomicznego asystenta przy zachowaniu wysokiego poziomu dokładności.
Jednym z najbardziej przydatnych zastosowań nowego sposobu nauczania robotów jest ich programowanie. Tradycyjne programowanie robota jest specjalistycznym, czasochłonnym i kosztownym procesem. Wymaga profesjonalnego szkolenia i mnóstwa praktyk w terenie. Nowy sposób nauki zakłada programowanie poprzez demonstrację. W procesie chwytania i opuszczania, ramię robota jest manewrowanie poprzez sensory, dzięki którym uczy się określonych pozycji i gestów. To łatwe i elastyczne rozwiązanie, które pozwala na szybkie i sprawne dostosowanie pracy robota do wymagań danego zadania lub zlecenia.
Źródło: © Siemens
W Chinach, w ramach projektu "Autonomous Systems Revolution" stworzonego przez dział Corporate Technology (CT) Siemensa, zespół badaczy analizuje podstawowe funkcje, które w przyszłości pozwolą na interakcje ludzi i robotów w branżach przemysłowych. Specjaliści opracowują tzw. rękawicę danych, która może być wykorzystana do przechwytywania ruchów oraz gestów ludzkich dłoni i opisywania ich na potrzeby powielenia przez robota.
Rękawica danych jest obecnie w wersji 2.0. Wyposażona jest w czujniki giętkie i inercyjne oraz czujniki bazujące na modelu biomechanicznym. Dzięki temu może wyczuwać ruch poszczególnych palców i ramienia użytkownika, a następnie przesyłać powiązane dane dotyczące położenia i postawy do ręki robota, który optymalizuje ruch. Czujniki bezwładnościowe mogą być również montowane na nogach, klatce piersiowej i innych częściach ciała ludzkiego w celu przechwytywania ruchów użytkownika, co ułatwia konfigurację modelu biomechanicznego.
Dzięki mikrokontrolerom na palcach rękawicy może ona generować drgania z różnymi częstotliwościami i amplitudami, które odpowiadają konkretnym uchwytom danego rodzaju przedmiotów. Funkcja sprzężenia zwrotnego pozwala na reakcję robota w czasie rzeczywistym.
Rękawice danych mogą być również stosowane do rejestrowania ruchów pracowników, którzy mają szkolić nowozatrudnionych oraz do wykrywania i naprawiania błędnych operacji. Gdy technologia ta rozwinie się, pracownicy cyfrowych fabryk będą mogli korzystać z rękawic, używając ich także w rozszerzonej rzeczywistości.
Bezpieczeństwo przede wszystkim
Jeśli roboty będą współpracować z ludźmi, kluczowe znaczenie będzie miało bezpieczeństwo. Mając to na uwadze, naukowcy z działu Corporate Technology Siemensa w Chinach opracowują nowy mechanizm kontroli, który jednocześnie zarządza pozycją i siłą ramienia robota. Biorąc pod uwagę wyraźnie określone maksymalne ograniczenie siły człowieka, robot będzie przewidywać zoptymalizowane ruchy, co uczyni z niego bezpiecznego i autonomicznego asystenta przy zachowaniu wysokiego poziomu dokładności.
Jednym z najbardziej przydatnych zastosowań nowego sposobu nauczania robotów jest ich programowanie. Tradycyjne programowanie robota jest specjalistycznym, czasochłonnym i kosztownym procesem. Wymaga profesjonalnego szkolenia i mnóstwa praktyk w terenie. Nowy sposób nauki zakłada programowanie poprzez demonstrację. W procesie chwytania i opuszczania, ramię robota jest manewrowanie poprzez sensory, dzięki którym uczy się określonych pozycji i gestów. To łatwe i elastyczne rozwiązanie, które pozwala na szybkie i sprawne dostosowanie pracy robota do wymagań danego zadania lub zlecenia.
Źródło: © Siemens