



© Delphi
Przemysł elektroniczny |
Decyzje podejmowane w ułamku sekundy
Delphi współpracuje z firmą Quanergy i wykorzystuje technologie zwielokrotnionych czujników do dalszej poprawy bezpieczeństwa jazdy.
Mówi się, że uderzenie piłki do baseballu, rzuconej z prędkością około 160 km/h, to najtrudniejsze zadanie w sporcie. Jednak podejmowanie decyzji w ułamku sekundy przez kierowcę jest co najmniej tak samo zniechęcające. Jak możemy jeździć bezpiecznie, jednocześnie podejmując w ułamku sekundy tak wiele decyzji?
Delphi pracuje nad tym, by pomóc kierowcom znacząco poprawić bezpieczeństwo jazdy. Spółka współpracuje z firmą Quanergy, producentem działających w trójwymiarze czujników lidarowych opartych na technologii półprzewodnikowej, wspierając w ten sposób swoje Zaawansowane Technologie Wspierania Kierowcy (ADAS) oraz systemy autonomicznej jazdy. W efekcie w przyszłości samochody będą w stanie myśleć i reagować 34 tys. razy szybciej niż większość ludzi.
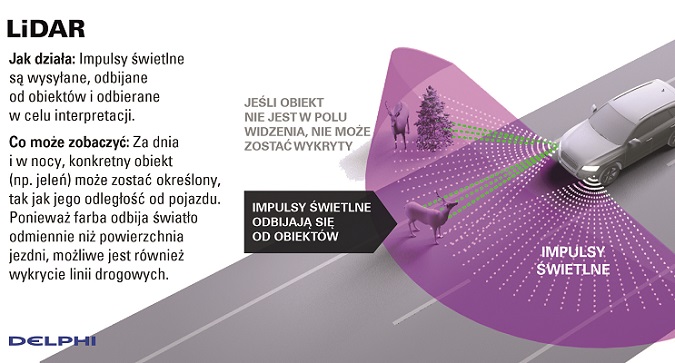
- Stosowane dzisiaj systemy radarowe i wizyjne działają jak oczy i uszy waszego samochodu – stwierdził Jeff Owens, dyrektor ds. technologii w Delphi. - Teraz, po dodaniu LiDARów – technologii wykorzystującej światło odbijające się od obiektów we wszystkich kierunkach do tych systemów, mamy do czynienia z wieloma poziomami ochrony samochodu, działającymi wokół całego pojazdu.
Radary mogą zobaczyć niemal każdy obiekt, ale nie są w stanie stwierdzić, czy zauważony jest kamień czy papierowa torba. Systemy wizyjne są w stanie odczytać znaki drogowe, jednak napotykają problemy jeśli są skierowane bezpośrednie pod światło lub jeśli soczewka kamery ulegnie zabrudzeniu. LiDAR łączy te niedociągnięcia i dostarcza system znacznie bardziej kompleksowy. - Wspólnie te technologie skutecznie poszerzają pole widzenia od około 120 stopni do niemal 360 stopni – w najlepszych rozwiązaniach - dodał Owens. - Innymi słowy, pole widzenia po obu stronach pojazdu poszerza się od mniej więcej szerokości drogi do ponad 91 metrów po każdej stronie.
Prawidłowe działanie LiDARu zależy od niezasłoniętego pola widzenia. Na przykład, jeśli jeleń wyskoczy z gęstego lasu, wówczas LiDAR zobaczy zarys lasu zanim zobaczy jelenia, ponieważ w tym obrazie znajduje się tak dużo obiektów. Jednak na otwartej przestrzeni LiDAR powinien wykryć obecność jelenia wcześniej, zanim jeszcze zrobi to radar.
Zdolność radaru do „widzenia” przez rozsiane obiekty takie jak drzewa powoduje, że jest on bardziej niezawodny w wypełnianiu „punktów martwych” LiDARu. Połączenie tych dwóch systemów daje większą dozę pewności, że odczyt dokonany przez samochód będzie prawidłowy.
Delphi współpracuje z firmą Quanergy nad rozwiązaniem zawierającym LiDAR, wysyłający 500 tys. promieni świetlnych na sekundę. Promienie odbite od przedmiotów wracają do samochodu w postaci zbioru punktów lub kropek stanowiących dane, tworzących obrys obiektu. Te promienie świetlne wysyłane przez LiDAR nie są widoczne dla oka ludzkiego ani dla zwierząt. - W każdej sekundzie, wasz samochód może analizować wiele aktualizowanych danych; jeśli odbite od obiektu promienie świetlne przesuwają się pomiędzy kolejnymi aktualizacjami, wówczas system będzie w stanie stwierdzić czy obiekt to element przyrody ożywionej czy przedmiot martwy znajdujący się na kursie kolizyjnym z waszym samochodem - dodał Owens.
 Odczyt z radaru może poinformować kierowcę o tym, że zwierzę zamierza wyskoczyć przed samochód, ponieważ radar jest w stanie wykryć prędkość innych obiektów. Odczyt z kamery pozwoli na odpowiednie sklasyfikowanie obiektu, np. na stwierdzenie, że jest to duże zwierzę. Odczyt z czujników LiDARu dostarczy systemowi dodatkowych informacji, np. o tym, jak duży procent drogi został przez niego zablokowany.
Jeśli systemy czujników współpracują ze sobą, wówczas co sekundę wasz samochód uzyskuje między 20 a 40 aktualizacji informacji o sytuacji na drodze (w zależności od tego, czy stosowany jest radar, LiDAR czy kamera o wysokiej rozdzielczości). W przyszłości, superkomputery będą w stanie opracować tor jazdy w sytuacji, kiedy obiekt nie porusza się. Wtedy oszacowany zostanie także drugi tor pozwalający na uniknięcie kolizji na wypadek, gdyby obiekt przesunął się w lewo i trzeci – na wypadek, gdyby obiekt przesunął się w prawo. Jeśli inny samochód znajduje się z tyłu za samochodem lub nadjeżdża z przeciwnej strony i uniemożliwia zatrzymanie pojazdu, wówczas komputer może być w stanie opracować także czwarty scenariusz zapewniający bezpieczeństwo. Wszystkie te obliczenia zostaną wykonane zanim jeszcze kierowca zorientuje się, że coś blokuje drogę.
© Dephi
Odczyt z radaru może poinformować kierowcę o tym, że zwierzę zamierza wyskoczyć przed samochód, ponieważ radar jest w stanie wykryć prędkość innych obiektów. Odczyt z kamery pozwoli na odpowiednie sklasyfikowanie obiektu, np. na stwierdzenie, że jest to duże zwierzę. Odczyt z czujników LiDARu dostarczy systemowi dodatkowych informacji, np. o tym, jak duży procent drogi został przez niego zablokowany.
Jeśli systemy czujników współpracują ze sobą, wówczas co sekundę wasz samochód uzyskuje między 20 a 40 aktualizacji informacji o sytuacji na drodze (w zależności od tego, czy stosowany jest radar, LiDAR czy kamera o wysokiej rozdzielczości). W przyszłości, superkomputery będą w stanie opracować tor jazdy w sytuacji, kiedy obiekt nie porusza się. Wtedy oszacowany zostanie także drugi tor pozwalający na uniknięcie kolizji na wypadek, gdyby obiekt przesunął się w lewo i trzeci – na wypadek, gdyby obiekt przesunął się w prawo. Jeśli inny samochód znajduje się z tyłu za samochodem lub nadjeżdża z przeciwnej strony i uniemożliwia zatrzymanie pojazdu, wówczas komputer może być w stanie opracować także czwarty scenariusz zapewniający bezpieczeństwo. Wszystkie te obliczenia zostaną wykonane zanim jeszcze kierowca zorientuje się, że coś blokuje drogę.
© Dephi
Odczyt z radaru może poinformować kierowcę o tym, że zwierzę zamierza wyskoczyć przed samochód, ponieważ radar jest w stanie wykryć prędkość innych obiektów. Odczyt z kamery pozwoli na odpowiednie sklasyfikowanie obiektu, np. na stwierdzenie, że jest to duże zwierzę. Odczyt z czujników LiDARu dostarczy systemowi dodatkowych informacji, np. o tym, jak duży procent drogi został przez niego zablokowany.
Jeśli systemy czujników współpracują ze sobą, wówczas co sekundę wasz samochód uzyskuje między 20 a 40 aktualizacji informacji o sytuacji na drodze (w zależności od tego, czy stosowany jest radar, LiDAR czy kamera o wysokiej rozdzielczości). W przyszłości, superkomputery będą w stanie opracować tor jazdy w sytuacji, kiedy obiekt nie porusza się. Wtedy oszacowany zostanie także drugi tor pozwalający na uniknięcie kolizji na wypadek, gdyby obiekt przesunął się w lewo i trzeci – na wypadek, gdyby obiekt przesunął się w prawo. Jeśli inny samochód znajduje się z tyłu za samochodem lub nadjeżdża z przeciwnej strony i uniemożliwia zatrzymanie pojazdu, wówczas komputer może być w stanie opracować także czwarty scenariusz zapewniający bezpieczeństwo. Wszystkie te obliczenia zostaną wykonane zanim jeszcze kierowca zorientuje się, że coś blokuje drogę.
© Dephi